

rsc's Diary: ELC-E 2022 - Tag 3
Das Convention Centre liegt direkt am Liffey, nur wenige Minuten Fußweg von der O'Connell Bridge, Temple Bar und dem Trinity College entfernt. Ein Besuch auf der ELC-E ist immer auch eine gute Gelegenheit, interessante Städte in Europa kennenzulernen. Und hier ist auch schon mein Bericht der Talks, die ich am Tag 3 gehört habe.
Continuous Delivery of IoT Sensors
Im ersten Vortrag des Donnerstags stellte Ulf Lilleengen (Red Hat) das Drogue IoT Projekt vor. Es ist in Rust geschrieben und kümmert sich um die Bereiche
- Continuous Integration,
- Continuous Testing und
- Continuous Development.
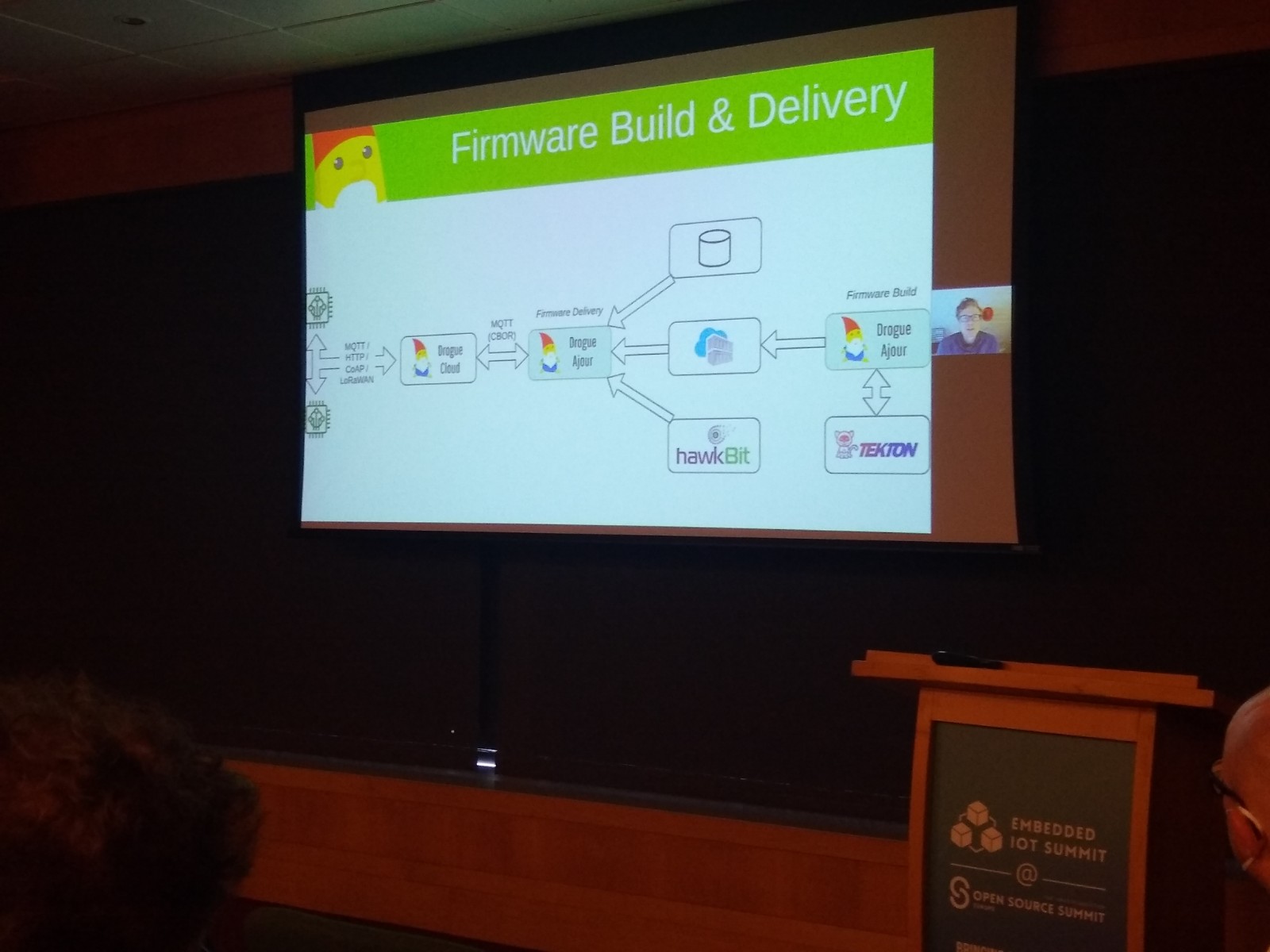
Die Devices, um die es ihm geht, sind Mikrocontroller, auf denen kein Linux läuft und bei denen die Update-Mechanismen in die Applikation integriert sind. Sie sind in der Regel über ein Wireless Netzwerk angebunden, z.B. WiFi, LoRaWAN, LTE-M oder Bluetooth, und werden von den Herstellern mit vielen unterschiedlichen Entwicklungsumgebungen ausgeliefert. Ein Problem beim Update ist, dass einige der Funksysteme Beschränkungen bei der Air Time haben: So dauert es bei einer Firmware-Größe von 64 KiB z.B. bei LoRaWAN drei Tage, bis ein Gerät ein vollständiges Update von einem Standard-Gateway empfangen hat. Damit das Gerät failsafe ist, wird zumindest ein minimaler Bootloader benötigt, der über den Funkkanal ein neues Image beschaffen kann.
Die Kommunikation im Drogue IoT Framework funktioniert über REST Schnittstellen und eine Vielzahl von API Endpoints. Man kann Devices in Gruppen zusammenfassen, und verschiedene Protokolle können zur Kommunikation genutzt werden. Zum Update fragt das Gerät bei einem Delivery System an, z.B. bei HawkBit. Der Vortrag schloss mit einer Demo, in der ein MicroBit Controller im Feld geupdatet wurde.
Die meisten der vorgestellten Komponenten passen nicht in unser übliches Embedded Linux Umfeld, aber bei den verwendeten Tools gibt es schon das eine oder andere, das einen genaueren Blick wert ist, z.B. Keycloak (für das Identity Management) oder die eingesetzten Kommunikationsprotokolle.
Beyond Complex Cameras: Complex Video Graphs Using PipeWire

Im nächsten Vortrag beleuchtete George Kiagiadakis (Collabora) aktuelle Fragestellungen rund um immer komplexer werdende Kameras. Moderne Kameras haben z.B. mehr als einen Sensor-Chip, Algorithmen zur Kombination der daraus erzeugten Bilder und eine Vielzahl an Hardware-Einheiten, die aus verschiedenen Datenquellen letztlich ein Bild oder einen Videostream machen, teils auch unter Zuhilfenahme von AI Beschleunigern. Es stellt sich heraus, dass die dafür benötigten Pipelines immer komplexer werden. Typischerweise werden solche Szenarien heute mit libcamera abgedeckt, aber es gibt ungeklärte Fragen:
- Wie kombiniert man die Daten von verschiedenen Geräten?
- Kann man das Processing splitten, z.B. in Container?
- Wie realisiert man eine gute "divide and conquer" Strategie?

Zu diesem Zweck wurde das Pipewire Projekt gestartet, das einen Multi Process, Ressource Sharing, Low Latency Multimediabus bereitstellt. Es gibt einen Graphen, in dem die einzelnen Prozessierungsschritte auf verschiedene Prozesse aufgeteilt werden. Der Graph wird von WirePlumber aufgesetzt, einem scriptbaren Daemon, der die vorhandenen Geräte herausfindet und passend miteinander verbindet.
In seiner Demo zeigte George einen Face Detection Algorithmus. Weiterhin existiert ein praktisches Tool zur Anzeige der erzeugten Graphen. Eine weitere Demo zeigte, wie man ein Videoplayback mit zwei synchronisierten Ausgabedisplays hinter einem gemeinsamen Videodecoder realisieren kann.
Der Vortrag ergab einen guten Überblick über Pipewire; auch bei Pengutronix nutzen wir Pipewire zunehmend mehr in den Multimedia Projekten unseres Grafikteams.
Growing a Lab for Automated Upstream Testing: Challenges and Lessons Learned
Laura Nao (Collabora) berichtete über die Herausforderungen aus Collaboras Testlabor. Die Firma betreibt in Cambridge ein Labor mit 158 Geräten, davon 32 unterschiedlichen Gerätetypen, die von 15 Servern und der üblichen Kombination aus Netzwerkswitchen, Debug Interfaces, USB-Hubs etc. kontrolliert werden. Die meisten eingesetzten Geräte sind 64-Bit-ARM-Chromebooks, wobei es oft mehr als ein Gerät von einer Sorte gibt. Die Boards werden in 19" Racks montiert. Das Setup hört sich sehr ähnlich zu dem an, das wir bei Pengutronix als LAVA Lab betreiben; allerdings sind die meisten unserer Labs eher mit industrieller Hardware bestückt.

Ein üblicher Testlauf startet mit dem Einschalten eines Prüflings; es startet der Bootloader, der Bootvorgang wird abgebrochen, Kernel und Ramdisk werden übertragen, dann wird der Bootvorgang fortgesetzt, das System bootet, das Testsystem loggt sich ein, startet eine Reihe von Testscripten, und schließlich wird das Board am Ende wieder ausgeschaltet. Die Konfigurationsfiles sind YAML-Files, die mit Jinja 2 getemplatet werden. Mittels eines Health-Jobs wird sichergestellt, dass das Lab selber gut funktioniert. Kernel-Log-Informationen werden mit einem Script aus dem Syslog gezogen. Ein GitLab-Runner ermöglicht, Jobs zu erzeugen. Neu ins Labor gehängte Geräte durchlaufen zunächst ca. 1000 Health Checks, bevor sie in den regulären Testbetrieb gehen.
Der Testflow für die Chromebook-Applikationen sieht schon sehr anders aus als bei normalen Linux-Applikationen. Da allgemein das Testen auf Chrome-OS schwierig ist, ersetzt Collabora es durch ein normales Linux.
Das Lab selbst ist in einen Staging- und einen Produktionsbereich getrennt. Auch die Upstream-Kernel werden im Staging-Bereich getestet. Lediglich bereits releasete Versionen werden im Produktionsbereich getestet.
Auch Kernel CI und Mesa CI Streams laufen auf dem Lab. Dabei ist das Ziel, die Upstream-Entwickler mit Testergebnissen zu versorgen und somit Fehler in der Revisionskontrolle so früh wie möglich aufzudecken. Die Mesa Tests sind noch relativ neu, dort werden auf x86 Pre-Merge Conformance Tests gemacht.
Auf dem Lab laufen sehr viele Jobs, somit kann auch eine Menge schiefgehen. So kann es vorkommen, dass die Hardware Probleme hat, ab und zu fallen auch Server aus, oder es schlagen Firmware-Bugs zu. Da z.B. Mesa die Aufnahme neuer Features von positiven Testergebnissen abhängig macht, ist es für die Betreuer des Testlabs wichtig, Infrastruktur-Fails von echten Testfehlern zu unterscheiden.
Einige Erkenntnisse:
- Robuste Health Checks sind sehr wichtig.
- Infrastruktur-Fehler müssen sauber detektiert werden.
- Nur mit genügend redundanten Devices ist eine gute Testabdeckung möglich.
- Es werden dauerhaft zwei Personen benötigt, um das Labor vor Ort zu betreuen.
Je größer das Lab wächst, desto mehr Platz, Komponenten aber auch Manpower wird zu dessen Betrieb benötigt.
Technical Introduction to EVerest: Open Source Firmware for EV Charging Stations
Auch für uns bei Pengutronix ist das Thema "Erneuerbare Energien" derzeit spannend, und es gibt Pläne, die entsprechende Infrastruktur mit möglichst vielen Open Source Komponenten zu betreiben. Insofern gab der Bericht von Kai-Uwe Hermann und Piet Gömpel (PIONIX GmbH) einen interessanten Einblick in die Welt der Ladestationen für Elektroautos.
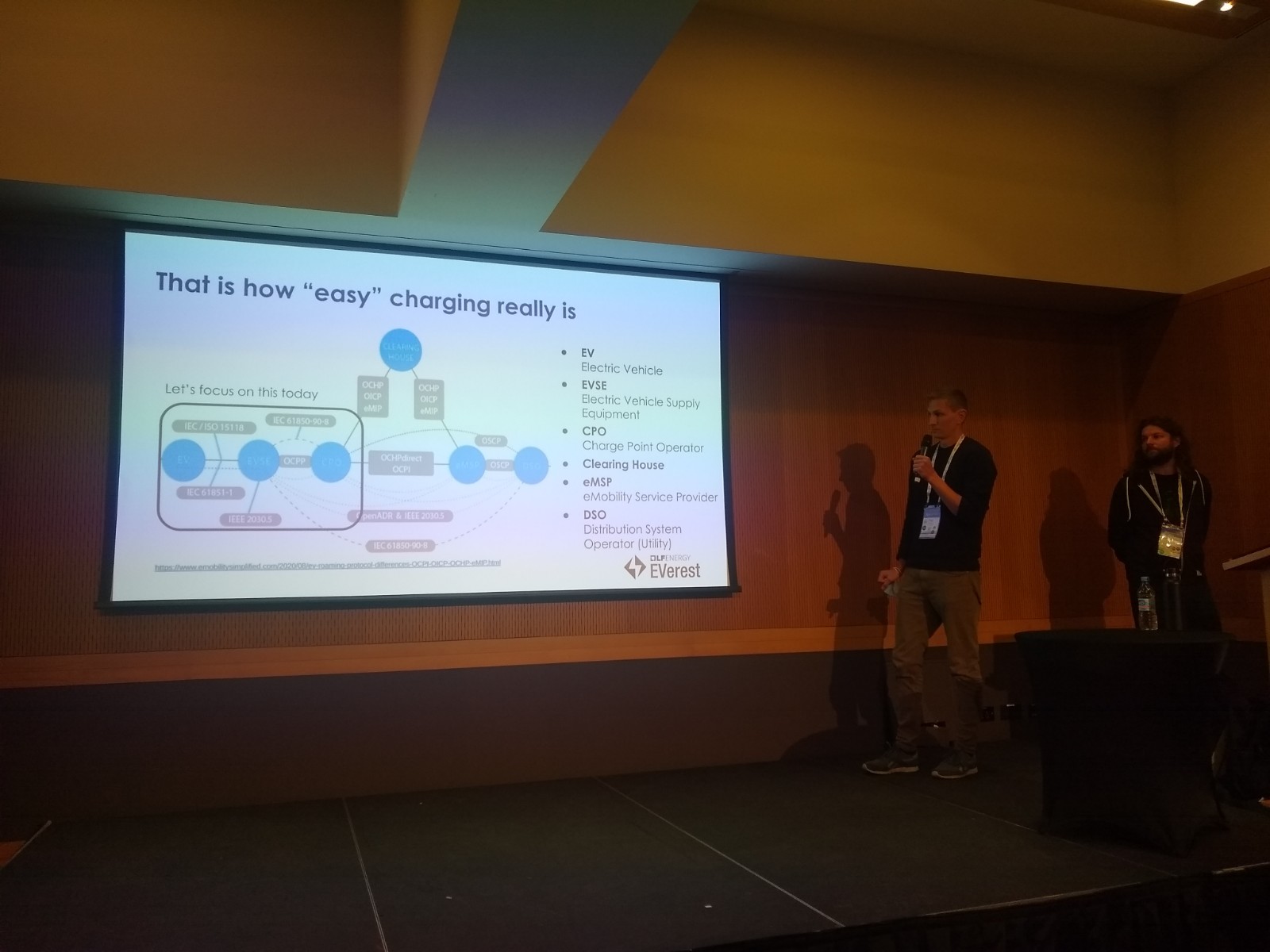
EVerest ist ein Softwarestack für Auto-Ladeinfrastruktur. Es stellt sich heraus, dass das Thema Ladeinfrastruktur überraschend komplex ist. Eine Ladestation besteht in der Regel aus Leistungselektronik und einem Controller für die Ablaufsteuerung (oft mit Linux). Es sind diverse unterschiedliche Standards beteiligt, sowohl auf der Stecker- als auch auf der Kommunikationsseite. Zwischen dem Controller und dem Cloud-Backend wird das OCPP Protokoll gesprochen, von dem es in der Praxis mehr als 150 Dialekte gibt, aber auch andere Protokolle wie IEC631100, MQTT und andere. Es gibt Bestrebungen für "plug-and-charge", aber dafür wird eine komplexe Authentifizierung benötigt, so dass es in der Praxis noch fast keine Implementierungen gibt.
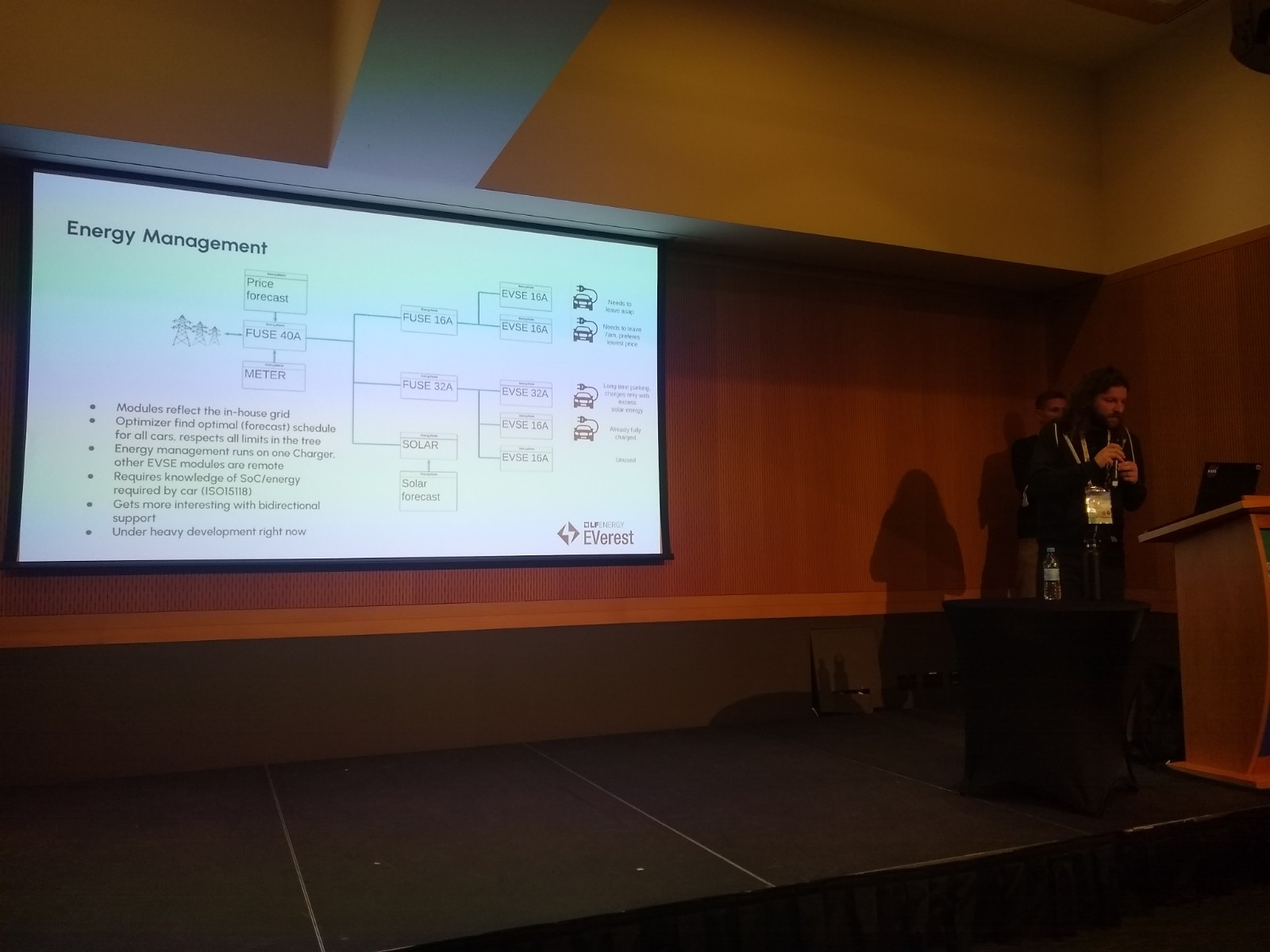
Ein weiterer Themenkomplex beschäftigt sich mit der Interaktion zu anderen Komponenten in einer lokalen Ladeinfrastruktur, z.B. wenn man dann laden möchte, wenn die Sonne gerade scheint und eine lokale PV Anlage Solarstrom erzeugt. Nimmt man diesen Komplex hinzu, gibt es eher noch viel mehr Protokolle, die eine Rolle spielen. Ähnlich ist es im Bereich der Grid-Kommunikation.
Alles in allem war das Fazit: Es gibt zu viele Standards, und es werden eher noch mehr. Da man diese Sorte Probleme nicht durch Hinzufügen eines weiteren Standards beheben kann, versucht das EVerest Projekt, eine Community Referenzimplementierung bereitzustellen. Es sollen so viele Hardware-Plattformen wie möglich unterstützt werden, ohne dass das Rad neu erfunden werden muss. Die Codebase ist in C++ geschrieben und unter der Apache 2.0 Lizenz auf GitHub veröffentlicht. Für eine einfache Konfiguration gibt es eine Web-Applikation. Derzeit wird OCPP in der Version 1.6 unterstützt - hier ist der Stack Feature-Complete, wohingegen an Version 2.0 derzeit gearbeitet wird.
Das Projekt gibt es nun seit zwei Jahren, es gibt eine Mailingliste und regelmäßige Meetings. Die Demo-Setups laufen auf Hardware von der Phytec und Mahle, aber es gibt derzeit noch keine marktfertigen Lösungen.
A Month Off: Migrating a Robot Controller from the Proprietary INtime RTOS to Linux
Dirk Eibach arbeitet für die Carl Cloos Schweißtechnik GmbH, einen Hersteller von industriellen Schweißrobotern. In 2021 startete er die Migration eines Roboters auf Preempt-RT.
Die existierenden Roboter-Controller bestehen aus einem selbst entwickelten PC, auf dem ein CAN-Bus, EtherCAT und ein Satz an Servomotoren als EtherCAT Slaves betrieben werden. Die Axen laufen dabei in einem "cyclic synchronous position mode" (CSP): Auf einem 1-4 ms Buszyklus stellt das System für alle Axen neue Zielpositionen bereit. Ein Motion Planner läuft auf einem Takt von 8...16 ms, wobei für den schnelleren Bustakt interpoliert wird. Mittels eines physikalischen Modells wird die Dynamik des Roboters simuliert.

Die Codebasis besteht aus 3 Millionen Lines-of-Code. Ursprünglich wurde diese mal in PL/M geschrieben und später auf C portiert. Es gibt nach wie vor 386 Assembler-Code und ANSI C, eine alte MFC GUI und eine neue Qt GUI (leider noch nicht Feature-Complete). Es gibt die übliche Technical Debt in der Codebase, es haben Mitarbeiter die Firma verlassen, und dabei ist auch Wissen verlorengegangen.
Im Jahr 2021 wurde mit KEBA gesprochen, da es dort einen recht vielversprechenden D3 Automation Controller mit 32 Bit Debian Linux gab, der eine integrierte Safety Lösung mitbrachte. Dadurch, dass auf diesem System die Möglichkeit bestand, alle Software auf einem System laufen zu lassen, konnten bereits eine ganze Reihe proprietärer Lizenzen eingespart werden. Jetzt war der Zeitpunkt günstig, so dass der Referent seinem Team vorschlug, in einem 6-Wochen Sprint eine Portierung auf Linux zu probieren. Dabei war ein wichtiger Aspekt, dass sich alle beteiligten Kollegen (auch Nicht-Linux-Entwickler) mit einer Entscheidung für eine Linux-Portierung wohlfühlen sollten. Überraschend gab es im Team Konsens, das Projekt zu starten.
Die komplette API wurde im Userspace als Shared Library implementiert, so dass die eigentliche Applikation nicht angefasst werden musste. Zunächst wurden Headerfiles nachimplementiert, dann mussten alle Funktionen implementiert werden, die vom Linker als fehlend ausgegeben wurden. Gleichzeitig begannen die GUI Entwickler mit der Migration der Oberfläche. An ein paar wenigen Stellen (IPC auf physikalischem Speicher) wurde letztlich doch die Applikation verändert.
Am Ende des 6-Wochen-Zeitraums war die Applikation so weit portiert, dass sie starten konnte; auch eine rudimentäre GUI war soweit funktionstüchtig, jedoch noch nicht abgeschlossen. Das Team war sich darüber im Klaren, dass man bei dem Projekt eine Menge gelernt hatte und der Ansatz generell der Richtige ist. Weiterhin ergab sich ein gutes Gefühl dafür, wie viel Arbeit der Rest der Portierung noch sein könnte. Selbst die bislang an Windows gewöhnten Entwickler waren mit der Arbeit mit Visual Studio zufrieden, so dass es wiederum eine gemeinsame Entscheidung gab, die Aktivitäten fortzuführen. Leider wurde der Abschluss des Projekts dann durch die Chipkrise ausgebremst.
Weiterführende Links

rsc's Diary: ELC-E 2022 - Tag 1
Nach zwei Jahren, in denen es nur Online Konferenzen gab, trifft sich in diesem Jahr die Embedded Linux Community zum ersten Mal wieder zur jährlichen Embedded Linux Conference Europe in Dublin, Irland. Seit vielen Jahren ist die ELC-E Teil des Open Source Summits der Linux Foundation; sie ist die größte Veranstaltung ihrer Art, bei der sich die Entwickler des Linux Kernels und des angrenzenden Core-Ecosystems treffen und über aktuelle und zukünftige Entwicklungsthemen diskutieren.

rsc's Diary: ELC-E 2022 - Tag 2
Das Dublin Convention Centre ist riesig - es gibt mehr als genug Platz für die vielen Teilnehmer des Open Source Summit. Zum Glück wird es die Vorträge nach der Konferenz auf YouTube geben, so dass es nicht schlimm ist, wenn man vor Ort nicht alle Vorträge hören kann. Hier ist mein Bericht zu den Vorträgen, die ich am zweiten Konferenztag gehört habe.

rsc's Diary: ELC-E 2022 - Tag 4
Freitag war der letzte Tag der ELC-E 2022 und somit auch der Tag des traditionellen ELC-E Closing Games. Tim Bird berichtete gewohnt kurzweilig über den aktuellen Stand der Embedded Linux World (Universe?) Domination. Und natürlich gab es auch am letzten Tag einige interessante Vorträge.

Girls' Day 2026
Unter dem Motto "Open Source - Open Future!" waren im Rahmen des Girls' Day am 23. April 2026 vier junge Frauen bei Pengutronix zu Gast. Zu Beginn gab es eine kurze Vorstellung von Pengutronix und natürlich die Antwort auf die Frage, was eigentlich dieses Embedded ist.

Pengutronix auf den Chemnitzer Linux Tagen 2026
Wir freuen uns, auch in diesem Jahr bei den Chemnitzer Linux Tagen dabei sein zu können. Wie jedes Jahr sind die CLT eine willkommene Gelegenheit, Freunde zu treffen und sich über Linux, Open Source und den Rest der Welt auszutauschen. Auch in diesem Jahr stellen wir uns mit einem eigenen Stand vor und freuen uns, vier Vorträge zum Vortragsprogramm beitragen zu können.
Pengutronix bei der Embedded Testing 2026
Pengutronix ist in diesem Jahr wieder Partner der der Embedded Testingu nd ist dort sowohl mit einem Stand als auch mit einem Vortrag vertreten. Die Embedded Testing findet am 24. und 25. Februar 2026 in Unterhaching bei München statt.
Pengutronix at FOSDEM and OE Workshop 2026
On January 31st and Febuary 1st 2026 it is once again time for waffles, Belgian beer and Open Source: FOSDEM will take place at ULB in Brussels. With over 8k hackers, FOSDEM is the biggest and most important Open Source conference in Europe. One other event riding the wave of FOSDEM is the the OpenEmbeddedWorkshop. The full list of co-located events is here. We are participating in both FOSDEM and OE Workshop and are looking forward to many interesting discussions with developers of different Open Source software components – be it the Linux kernel, Yocto, Labgrid, Debian, and others...

Pengutronix at Open Source Summit Europe and Embedded Linux Conference Europe
The Embedded Linux Conference Europe is Pengutronix' most important conference of the year. It is a good place to meet new faces in the embedded community, discuss current topics and future developments with maintainers and developers - and of course: have a beer with old friends. As usual, many Pengutronix colleagues will attend: this year we'll have a 14 person team on site. So watch out for our T-shirts and hoodies and and feel free to chat with us.
Embedded Linux Conference Europe 2023: Our Recommendations
Last month Pengutronix was present at the Embedded Open Source Summit (EOSS) in Prague. Thanks to all to all speakers for sharing your knowledge! In this blog post we want to shine a spotlight at a few talks that we found especially interesting. (Links to recordings will be added once the recordings are available.)

Embedded Linux Conference Europe 2023: Our Contributions
This year the Embedded Linux Conference Europe (ELCE) is back in Prague! Pengutronix, again, is on a field trip with 15 colleges to attend the conference. The ELCE is one of the big conferences where the Embedded Linux Community meets during the year. This time the ELCE is part of the Embedded Open Source Summit (EOSS): a new conference with only embedded topics and without cloud- or crypto-tracks.