

Update of our Remotelab equipment
"If it looks like a duck, swims like a duck, and quacks like a duck, then it probably is a duck."
If it looks like an advertising blogpost, reads like an advertising blogpost ... it probably is an advertising blogpost! Nobody likes to read advertisements and we don't like to write them at all, but like all proud parents, we would like to show you the new products that our corporate subsidiary, Linux Automation GmbH, has freshly added to their store. With these new products we, and maybe soon you, will complete (y)our Remotelab infrastructure.
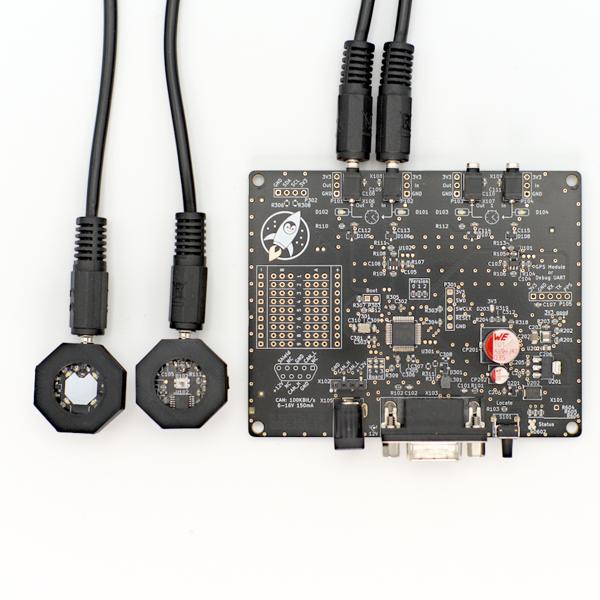
LXA IOBus 4DO-3DI-3AI
LXA IOBus 4DO-3DI-3AI
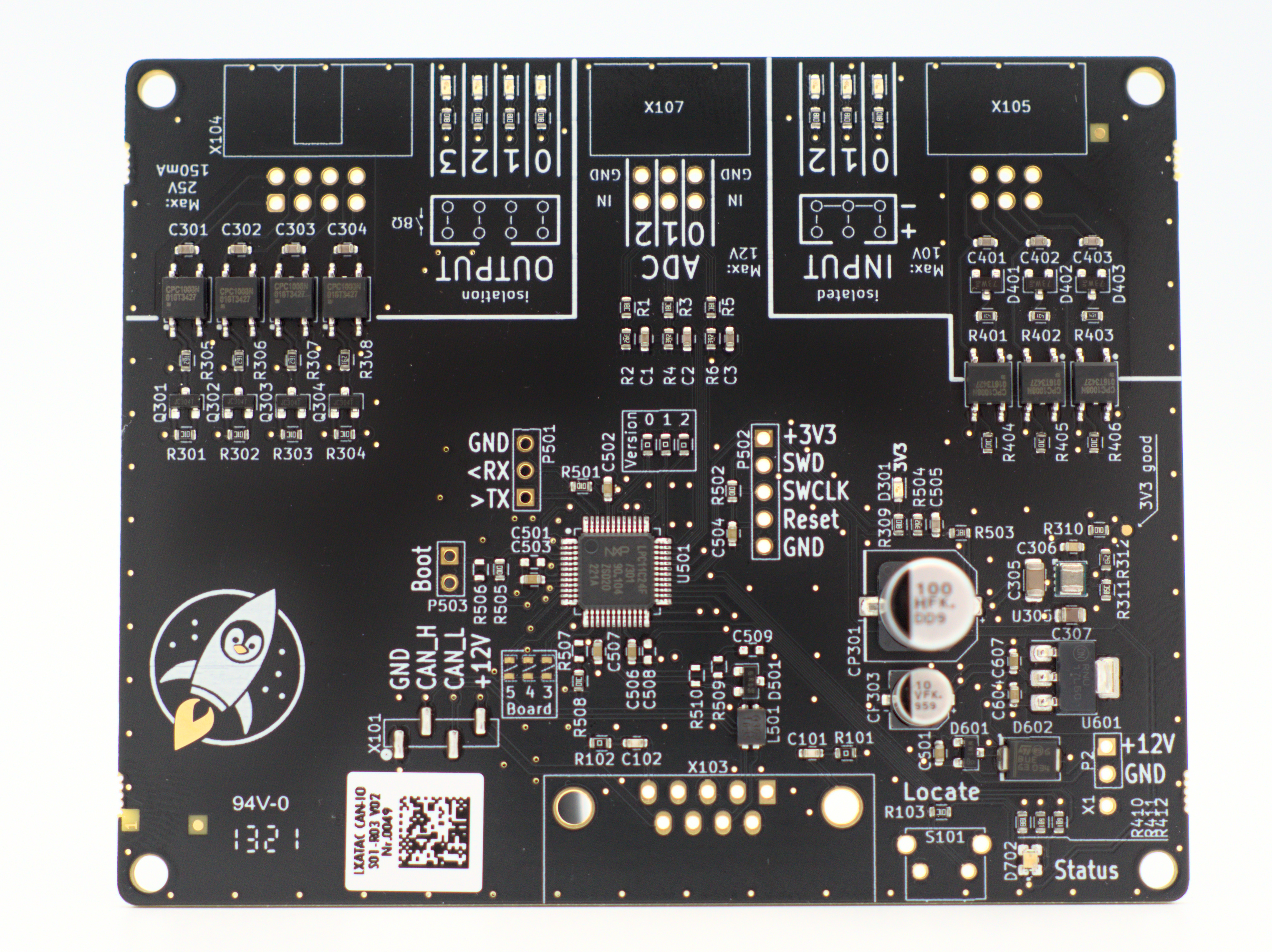
Not all projects boot from SD cards, sometimes boards are flashed via USB, boot from an eMMC or even from NAND¹. To switch the active boot mode in this case, you usually just have to short-circuit two pins, or press a button. Since this quickly becomes tiring, especially during constant tests, there is now an elegant technical solution:
The LXA IOBus 4DO-3DI-3AI allows to switch small electrical loads and thus e.g. automatically, where otherwise jumpers would have to be set manually, to switch between different boot modes or to trigger resets, which are otherwise performed by pressing a button. In addition, the 4DO' can be used to read supply voltages or collect digital status feedback and feed it back into the test automation.
candleLight

CandleLight
In our blog post The LXA IOBus line of lab automation devices we already reported about the ideas to change our lab-internal communication from USB to CAN. A recurring problem with this: a consumer computer cannot do CAN. In our lab servers we usually solve this problem with PCI-Express CAN cards, but for developer laptops these cards are too clunky.
Instead, we like the open source candleLight project very much. So well, in fact, that we decided to brand it with a Rocket Penguin logo and add it as a product to the store.
RJ45-Matrix

RJ45-Matrix
The RJ45-Matrix is another small, but still very fine toy from the LXA-Tools series. The RJ45-Matrix can be used to make connections between all lines of two RJ45 jacks via solder bridges or any 0402 SMD components.
What have we used the RJ45 matrix for so far?
- As a breakout board for RJ45 jacks on 2.54mm pin headers.
- To swap Ethernet pairs between two Ethernet ports.
- To couple two Ethernet devices via 0402 capacitors AC to feed PoE voltages directly.
What other uses could we think of?
- To create loopback connections, e.g. to test very long two-wire links over much shorter eight-wire cables.
- Generating defined cross talk by coupling the different pairs together.
- Inserting e.g. resistive losses into a line.
¹ What kinds of headaches NAND can create as a boot source would be a great topic for another blog post. Until then, perhaps remember: "Avoid if possible!"
Further Readings
Showcase: Remote Working
Project work with our customers includes the handling of hardware prototypes. Since work is generally done in parallel, on many project for many customers, there is a constant flood of hardware prototypes accumulating on the desks of our developers. These accumulations of loose boards can become a problem. This is especially the case when a number of people work on a prototype. Another common annoyance occurs when a project has not been worked on for a period of time, as this might involve moving the hardware from one desk (or storage location) to another and setting it up again. Right now, in a situation where working from home is more common and relevant than ever, this has become even more of an issue. The distances between desks and storage locations of our developers are now measured in kilometers, rather than meters.
USB-SD-Mux: EMC Testing
Today Jonas and I went to our EMC testing lab to continue the measurements needed to certify electromagnetic compatibility for the USB-SD-Mux.
Pengutronix bei der Embedded Testing 2026
Pengutronix ist in diesem Jahr wieder Partner der der Embedded Testingu nd ist dort sowohl mit einem Stand als auch mit einem Vortrag vertreten. Die Embedded Testing findet am 24. und 25. Februar 2026 in Unterhaching bei München statt.
You can buy RAUC and labgrid sponsor packages now
RAUC and labgrid are open source software projects started at Pengutronix, that are quite successful in their respective niche. Starting today you can buy sponsorship packages for both projects in the Linux Automation GmbH web shop, to support their maintenance and development.
Talks, Workshops, Time at the Beach - Embedded Recipes 2025
I was part of a small delegation of Pengutronixians at the Embedded Recipes conference this year in Nice, France. We had a great time there, so let's take a look back at the great talks we have seen, the labgrid workshop we held and our time in Nice in general.

The USB-SD-Mux is now FAST
We have been distributing the USB-SD-Mux with our partner company Linux Automation GmbH since 2019. This has enabled us to make work easier for many embedded developers and improve software quality. At the same time, technology is advancing: micro SD cards are becoming faster and USB-C is now established as the standard.
Linux Automation's Optick: A Glass-to-Glass Latency Measurement Tool
New Linux Automation GmbH products are often inspired by needs we observe in our day-to-day development work at Pengutronix. Today's new product, the Optick, was inspired by our graphics team, that works with different kinds of video pipelines and optimizes them based on customer demands. One such demand is minimizing the latency of camera to display video pipelines.

LXA USB-T1L ❤️ Beagle Play: Exploring Single Wire Ethernet
It seems everybody is talking about Single Pair Ethernet (SPE) these days. So we want to follow the trend and do the same :-) SPE is a class of Ethernet transmission standards that uses just a single pair of twisted pair cable for data transmission. There are multiple SPE variants spanning maximum data rates from a hand full MBit/s to multiple GBit/s and cable lengths from a hand full of meters to kilometers. The most interesting ones from our embedded-centric point of view are 10Base-T1L (point-to-point, up to 1 km), 10Base-T1S (multidrop, approx. 10 m) and 100Base-T1 (point-to-point, 15 m). The new Beagle Play comes with a 10Base-T1L PHY. This makes it a great peer to experiment with our Linux Automation USB-T1L. In this post we will explore the possibilities of 10Base-T1L on a recent Linux system.